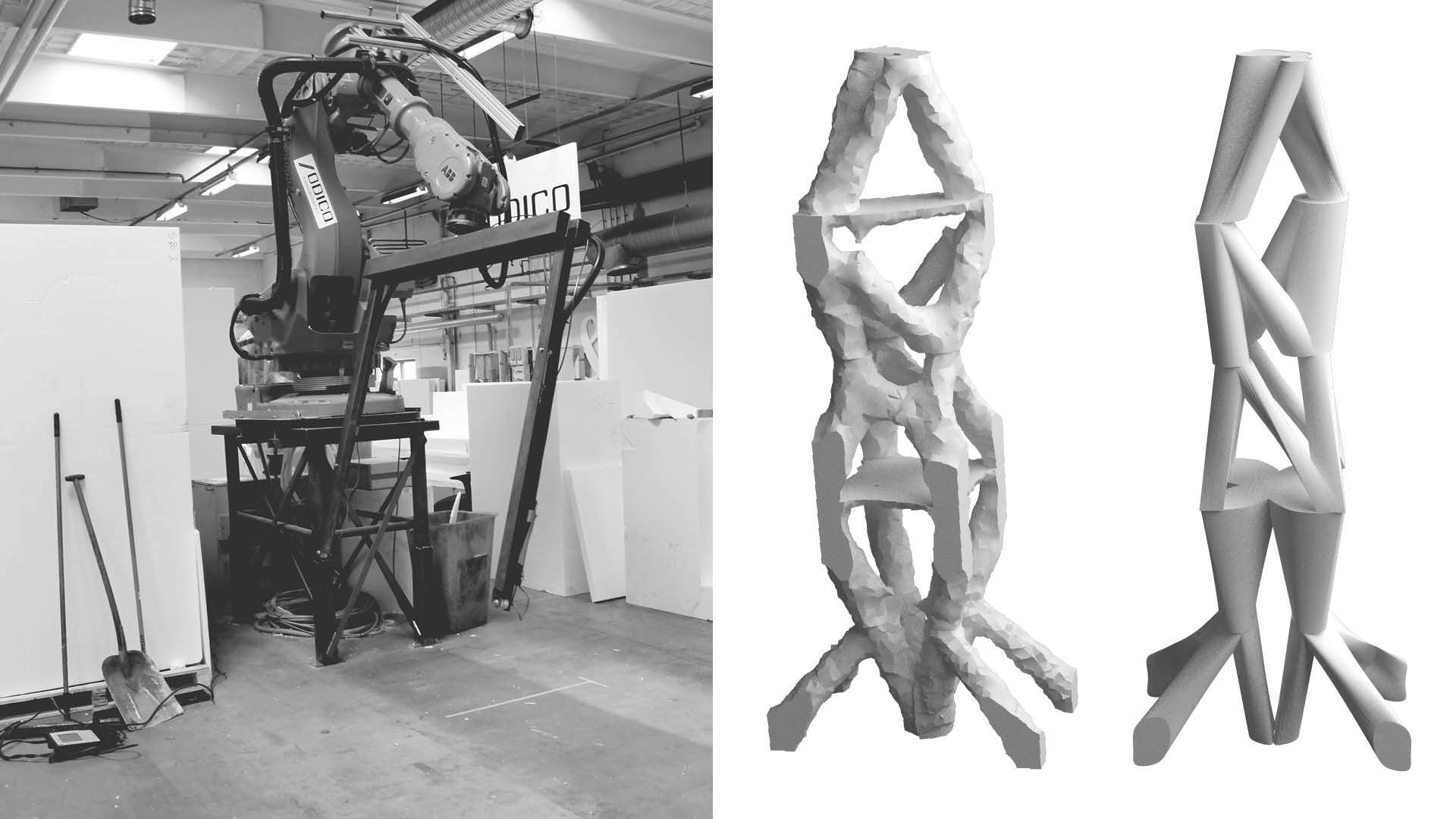
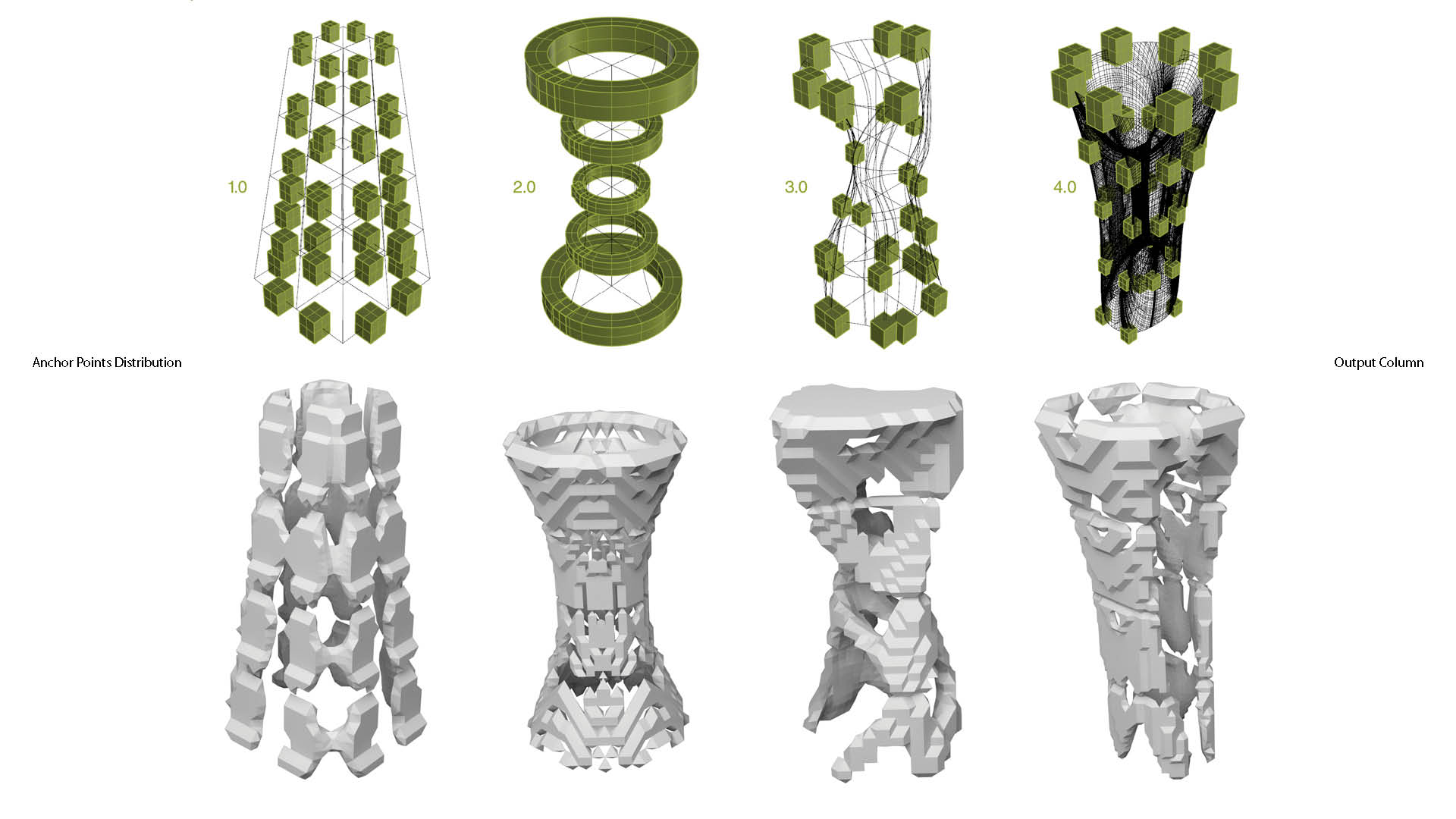
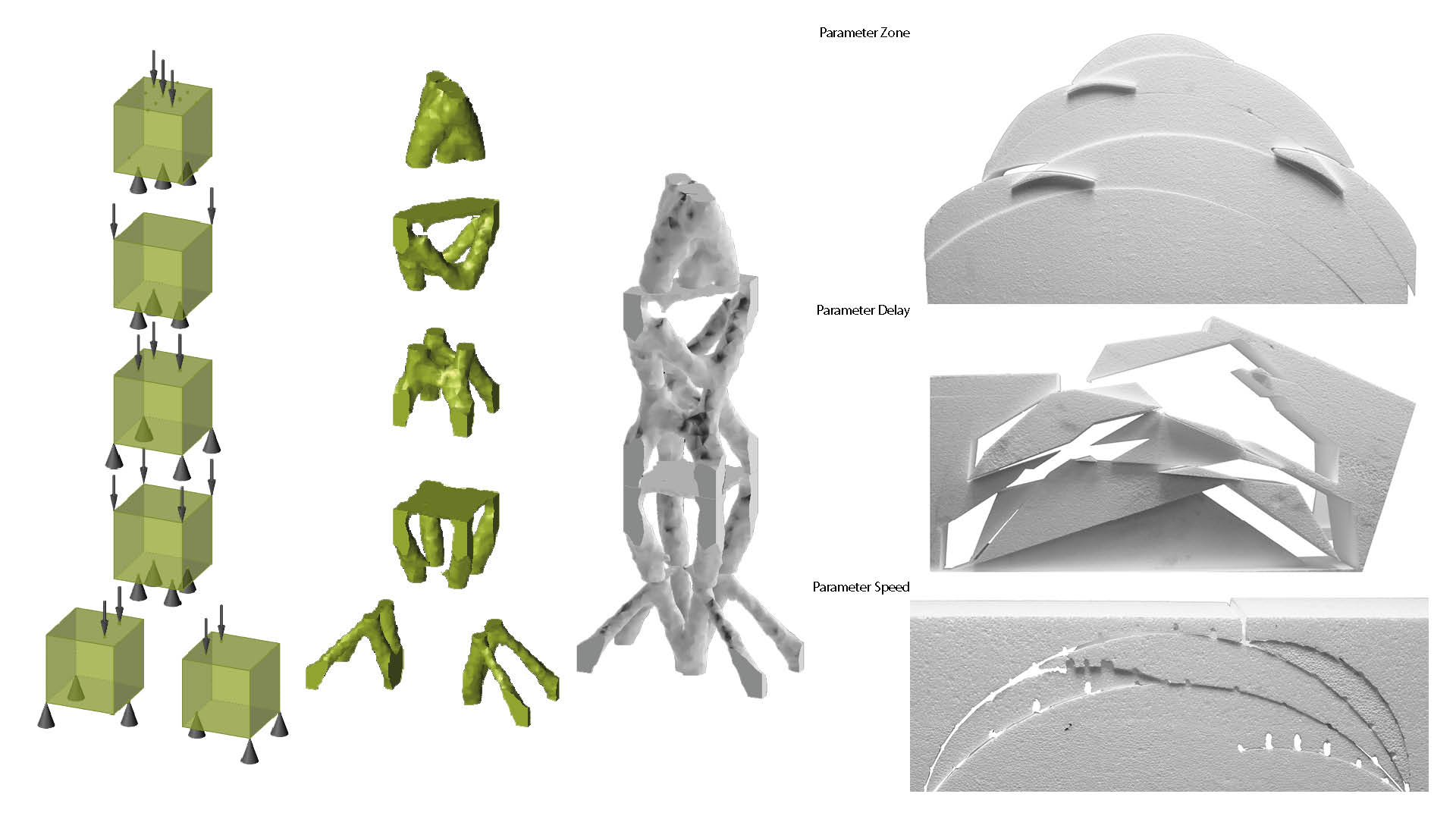
Form finding robotics was at the core of a three-day workshop organized by Odico, a robotic fabrication company based in Odense, Denmark. The focus was on robotic control and feedback using software including PyRapid (developed by Odico), Rapid code, Inspire, and Rhinoceros. The workshop unfolded in two phases, each exploring different aspects of form finding robotics. In the first phase, participants studied the effects of robotic parameters by simulating geometry from Rhino in PyRapid using default settings, then tweaking Rapid code to adjust inverse kinematics. Key parameters included velocity, delay, and zoning, with modifications made based on how each influenced material behavior. The second phase used topological optimization, beginning with a cube and testing various load-support setups. A feedback system turned each support into a load in the next iteration. Final geometries were simplified in Rhino into ruled-surface components, visualized virtually, and tested in PyRapid before robotic fabrication.
Year | 2014
Location | Aarhus, Denmark
Status | MArch Thesis
Program | Digital Simulation
Tutors | S. Bhooshan, A. Sondergaard
Team | M. Santi, S. Aburas, G. Nikas, M. P. Velasquez